Text size
Line height
Text spacing

История и сферы применения БПЛА
• Беспилотные летательные аппараты (БПЛА) имеют долгую историю, начиная с первых попыток создания управляемых воздушных аппаратов.
• В начале XX века были разработаны первые успешные БПЛА, такие как самолет-мишень De Havilland DH82B Queen Bee.
• Вторая мировая война запустила гонку вооружений, включая системы телеуправления для различных видов техники.
• Современные военные БПЛА подразделяются на разведывательные, ударные и многоцелевые.
• Израильские военно-воздушные силы создали инновационные БПЛА, которые успешно вошли в состав воздушного флота многих стран.
• MQ-1 Predator является известным ударным БПЛА, используемым в военных конфликтах.
• Развитие БПЛА в начале XXI века направлено на повышение автономности и снижение радиолокационной заметности.
Урок 2. Основы аэродинамики
• Аэродинамика изучает движение воздуха и механическое взаимодействие между воздушным потоком и обтекаемыми телами.
• Основная задача аэродинамики - определение сил и моментов, действующих на летательный аппарат в различных условиях полета.
• Закон Бернулли справедлив для жидкостей и газов и гласит, что в участках течения жидкости, где скорость больше, давление меньше и наоборот.
• Крыло в авиационной технике является несущей поверхностью, создающей аэродинамическую подъемную силу.
• В полете крыло подвергается влиянию четырех главных сил: силы тяжести, подъемной силы, силы тяги винта и силы сопротивления воздуха.
• Подъемная сила возникает благодаря разности давлений и образующейся разности давлений, направленной в сторону меньшего давления.
• Угол атаки и несимметричный профиль поперечного сечения крыла влияют на возникновение аэродинамической силы.
• Подъемная сила крыла зависит от угла атаки, кривизны профиля, площади крыла, плотности воздуха и скорости полета.
• Крылу необходимо придать такую форму, чтобы оно развивало максимальное значение подъемной силы и минимальное лобовое сопротивление.
• Число, показывающее, во сколько раз подъемная сила больше лобового сопротивления, называется аэродинамическим качеством.
Урок 3. Классификация и устройство БПЛА.
• БПЛА - беспилотные летательные аппараты, используемые в различных сферах деятельности.
• Существуют различные типы БПЛА, включая самолеты, мультироторы, аэростатические аппараты и гибридные разновидности.
• Каждый тип БПЛА имеет свои преимущества и недостатки, связанные с грузоподъемностью, надежностью, безопасностью и стоимостью полета.
• БПЛА могут быть использованы в различных областях, таких как реклама, видеонаблюдение и телекоммуникации.
• Существуют гибридные разновидности БПЛА, такие как автожиры и конвертопланы, сочетающие в себе признаки вертолетов и самолетов.
• Автожиры обладают уникальными характеристиками, такими как возможность взлета и посадки без пробега или с коротким разбегом.
• Конвертопланы представляют собой летательные аппараты с поворотными винтами, которые работают как подъемные и тянущие в зависимости от фазы полета.
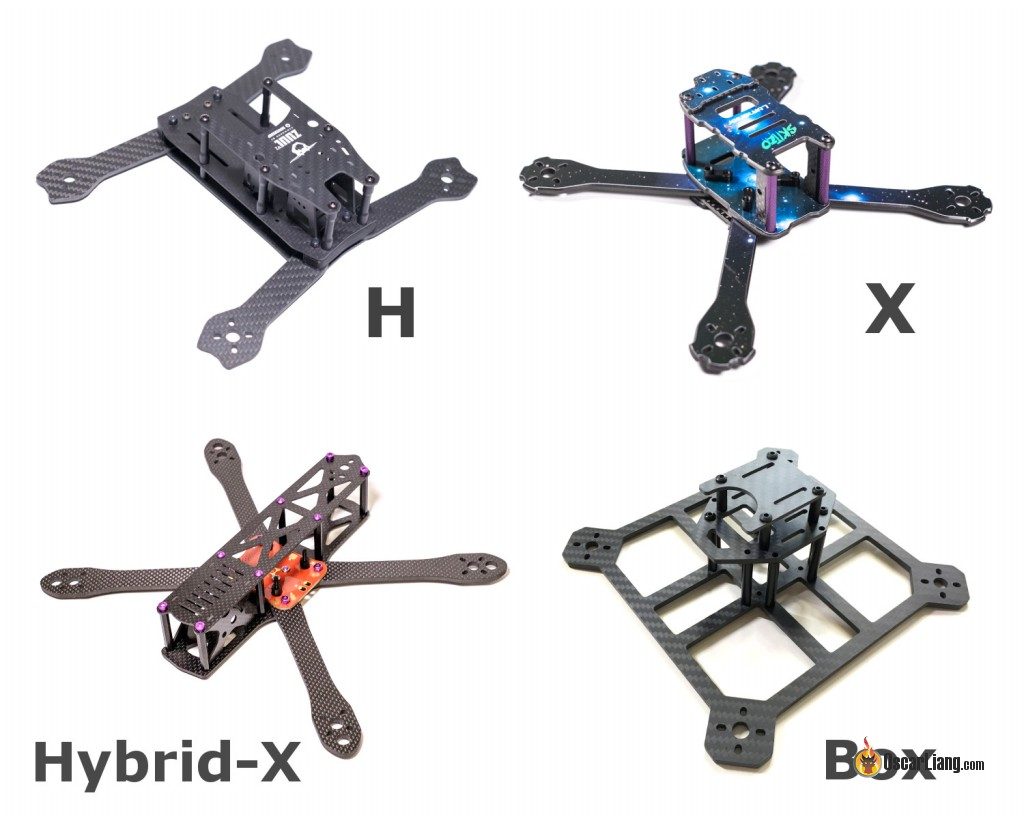
Урок 4. Типы рам, принцип работы квадрокоптера.
• Квадрокоптеры используются в различных областях, включая аэрофотосъемку, мониторинг и развлечения.
• Материалы для изготовления квадрокоптеров включают карбоновые волокна, стеклотекстолит, фанеру и другие.
• Карбоновые материалы обладают высокой удельной прочностью и малым весом.
• Различные типы рам и защиты используются для обеспечения безопасности и долговечности квадрокоптеров.
• Защитные конструкции включают дуговую, корпусную, сферическую защиту и другие варианты.
• Расположение шасси и подвесов на раме является важным вопросом при проектировании гоночных коптеров.

Урок 5. Основы FPV — FPV Клуб
• FPV (First Person View) - трансляция видео в режиме реального времени с камеры дрона на монитор, очки или шлем пилота.
• Система FPV многокомпонентная и реализована с помощью нескольких технологий.
• Телеметрия или OSD (One Screen Display) - вывод телеметрической информация на видеопоток и отображение на дисплее очков, планшета, телефона.
• Качество цифрового изображения значительно лучше, при этом еще есть потенциал, куда стремиться.
• Аналоговое FPV на 2.4ГГц - устаревшая технология, практически не используется.
• Wi-Fi FPV на 2.4ГГц - новая бюджетная технология, но картинка транслируется с существенной задержкой.
• Аналоговое FPV на 5.8ГГц - лучшая из трех, выбор профессионалов и любителей.
• В профессиональное беспилотное хобби постепенно входит полёт от первого лица, построенный на цифровой более мощной начинке.
Урок 6. Двигатели
• Винтомоторная группа создает тягу для движения ЛА в нужном направлении.
• В ВМГ входят двигатель и воздушный винт для мультироторных БПЛА.
• Квадрокоптеры используют коллекторные и бесколлекторные двигатели.
• Коллекторные двигатели имеют низкую стоимость и простоту конструкции, но высокий уровень шумов и низкий КПД.
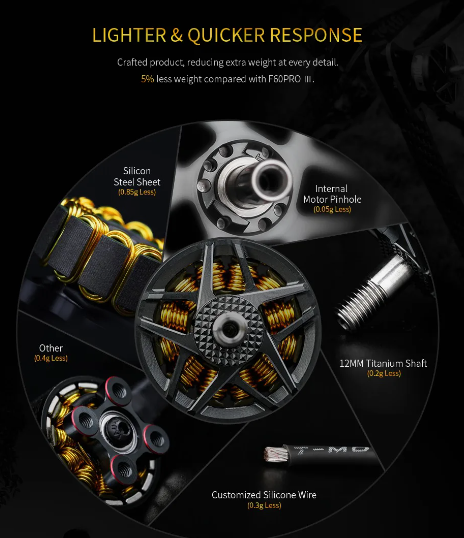
• Бесколлекторные двигатели состоят из статора, неодимовых магнитов, корпуса и вала мотора.
• Бесколлекторные двигатели имеют преимущества, такие как широкий диапазон частоты вращения, возможность использования во взрывоопасной среде и высокий КПД.
• Недостатки бесколлекторных двигателей включают сложную систему управления и более высокую стоимость.
• Размеры моторов записываются цифрами, и чем больше размер статора, тем больше крутящий момент и мощность двигателя.
• KV - это предельная частота оборотов двигателя при заданном напряжении.

урок 7. Пропеллеры
• Квадрокоптеры имеют пропеллеры, которые создают подъемную силу и управляют движением.
• Пропеллеры имеют разные характеристики, такие как шаг, тяга, угол атаки и конфигурация.
• Увеличение количества лопастей может компенсировать размер пропеллера и обеспечить большую тягу.
• Разные виды лопастей имеют разные преимущества и недостатки.
• Направление вращения пропеллеров может быть CW или CCW.
• Материал пропеллеров может влиять на летные характеристики, но безопасность должна быть приоритетом.
• Выбор материала пропеллеров зависит от времени года и может быть разным.
• Маркировка пропеллеров может содержать информацию о длине, шаге и количестве лопастей.
• Некачественная балансировка пропеллеров может вызывать избыточные вибрации и ухудшать качество полета.
Урок 8. Регуляторы оборотов
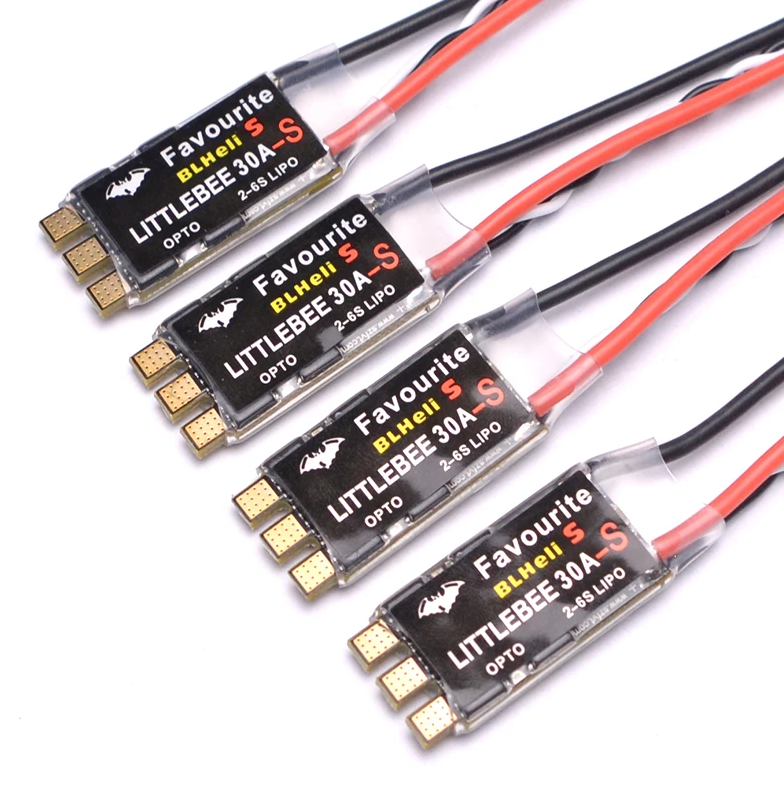
• ESC (электронный контроллер скорости) регулирует обороты двигателя квадрокоптера.
• Контроллер полета посылает данные регулятору оборотов для изменения подачи напряжения на двигатель.
• Регуляторы оборотов подают напряжение на обмотки двигателя в заданной последовательности для вращения ротора.
• Обмотки бесколлекторного мотора соединены по специальной схеме и имеют три вывода.
• Регуляторы оборотов имеют максимальный ток и максимальное рабочее напряжение, которые нужно учитывать при выборе.
• Регуляторы разрабатываются для повышения реакции силовой установки на расчеты полетного контроллера.
• Существуют разные протоколы передачи данных в ESC, включая PWM (широтно-импульсная модуляция) и DSHOT.
• Регуляторы оборотов бывают "4 в 1" и отдельные, с разными преимуществами и недостатками.
• Плата распределения питания используется для разделения основного разъема АКБ на четыре ESC.
Урок 9. Полетный контроллер
• Удержание мультироторной машины в воздухе требует быстрой реакции на силы и молниеносных решений.
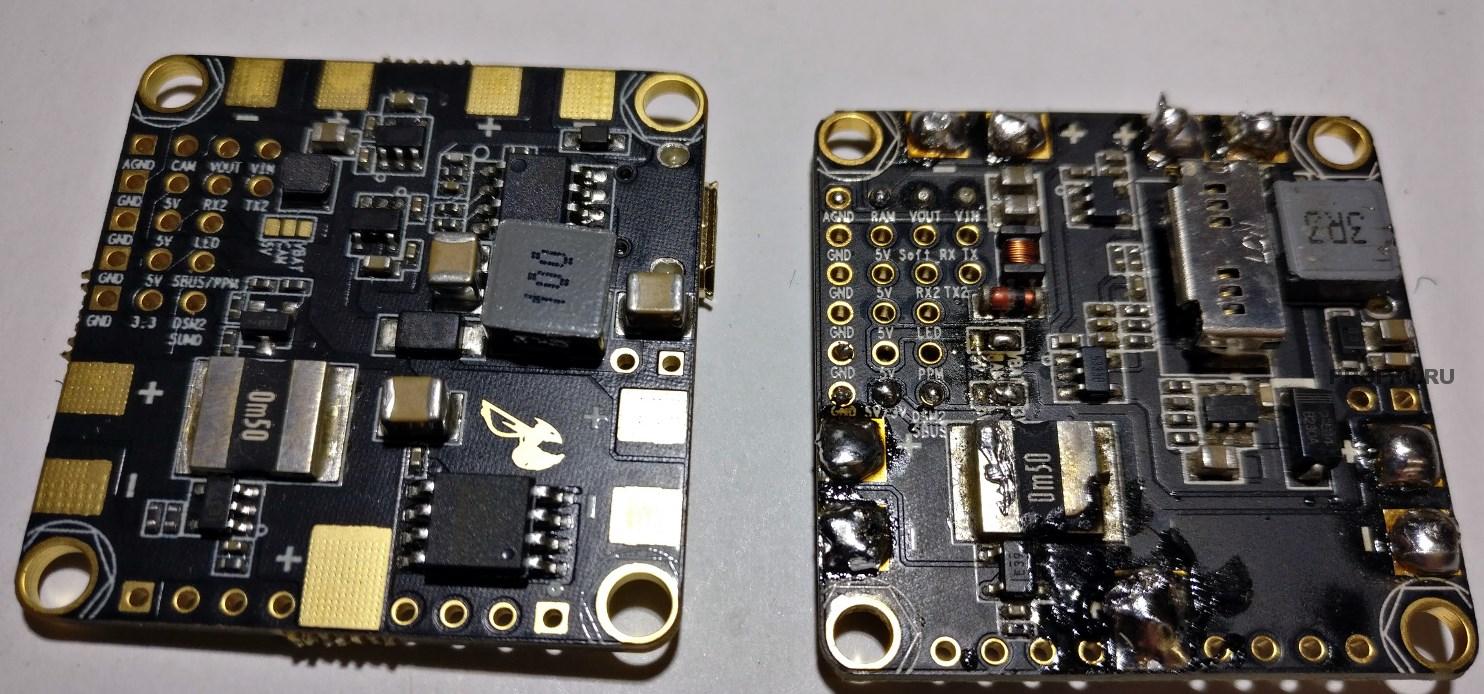
• Полетный контроллер является электронным устройством, управляющим полетом беспилотного летательного аппарата.
• На полетном контроллере установлены датчики, регистрирующие информацию о углах ориентации квадрокоптера.
• Микропроцессор производит сложные математические расчеты и определяет скорость вращения каждого мотора.
• Полетные контроллеры квадрокоптеров строятся на базе микропроцессоров STM32 с разными скоростями и возможностями.
• Датчик MPU реализует функции 3-осевого гироскопа, акселерометра и магнитометра, обеспечивая 9-осевую инерциальную навигацию.
• Напряжение и регуляторы напряжения требуются для питания электронных компонентов квадрокоптера.
• Программное обеспечение полетных контроллеров включает специальные наборы правил и алгоритмов, обрабатываемые микроконтроллером.
Урок 10. Аккумуляторная батарея.
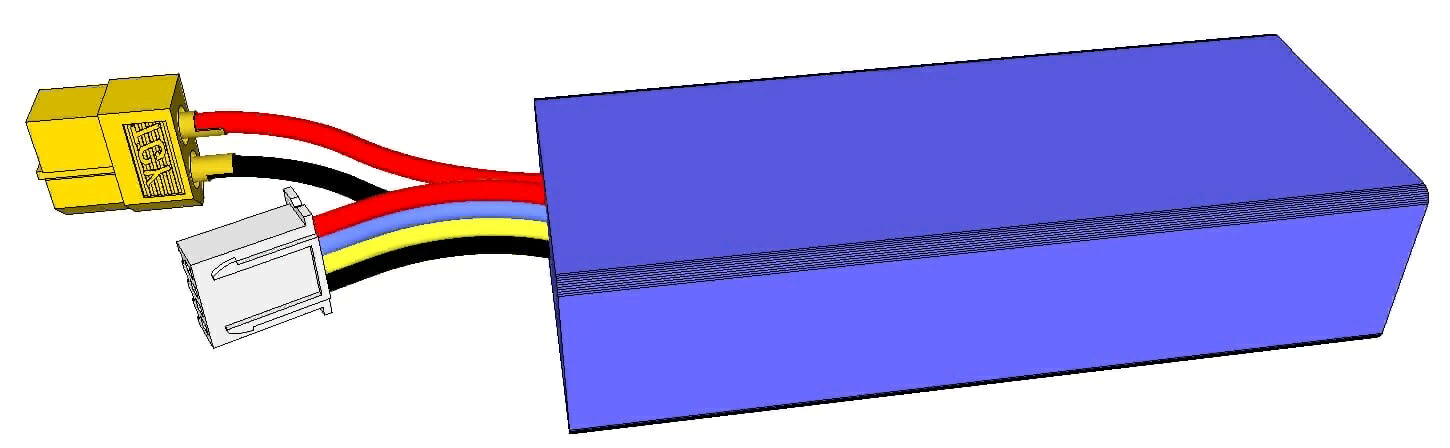
• Литий-полимерные аккумуляторы широко используются в FPV дронах и гоночных дронах благодаря своей способности накапливать и обеспечивать энергией при небольшом весе.
• Аккумуляторная батарея состоит из нескольких аккумуляторов или банок, которые имеют номинальное напряжение 3,7 вольт.
• Реальное напряжение аккумулятора зависит от степени его заряда и может варьироваться от 3 до 4,2 вольт.
• При последовательном соединении аккумуляторов итоговое напряжение будет равно сумме напряжений всех входящих сборку элементов или банок.
• Емкость аккумулятора показывает, как долго батарея может отдавать номинальный ток и измеряется в миллиАмпер-часах или Ампер-часах.
• Чем выше емкость, тем дольше от одной зарядки может работать квадрокоптер, но также увеличивается вес батареи.
• Важной характеристикой аккумулятора является максимальный разрядный ток или токоотдача, которая указывается в единицах "С".
• Рекомендуется выбирать батареи таким образом, чтобы расчетный рабочий ток не превышал 70 процентов от номинальной токоотдачи батареи.
• При повышении максимального тока разряда может произойти перегрев аккумулятора, что может привести к его деградации и возгоранию.
Урок 11. Расчет ВМГ
• Расчет ВМГ начинается с выбора двигателя, учитывая полетный вес квадрокоптера и необходимую тягу.
• Тяговооруженность является коэффициентом, выражающим отношения силы тяги к полной массе летательного аппарата.
• Для акробатики рекомендуется иметь соотношение тяги к весу не менее 5 к 1.
• Существует несколько способов выбора двигателя и винта для мультикоптера: использование калькулятора для мультикоптеров (eCalc), самостоятельный расчет по тех.карте двигателя или пример с уже готовым мультикоптером.
• Важно учитывать максимальный размер пропеллеров, которые возможно установить, и выбирать моторы с рекомендуемыми пропеллерами, учитывая их оптимальные обороты висения.
• Расчет ВМГ включает выбор мотора, аккумуляторной батареи и их взаимосвязь друг с другом, влияющую на время полета и потребление энергии моторов.

Министерство образования и науки Российской Федерации
САНКТ-ПЕТЕРБУРГСКИЙ
ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Петра Великого
УДК 681.51
Б91
Р е ц е н з е н т ы:
Заслуженный профессор СПбГЭТУ «ЛЭТИ»,
доктор технических наук, профессор СПбГЭТУ «ЛЭТИ» В. В. Путов
Доктор технических наук, профессор СПбПУ В. С. Заборовский
Бурдаков С. Ф. Управление квадрокоптером при полетах с малыми и средними перегрузками / С. Ф. Бурдаков, А. О. Марков. – СПб. : Изд-во Политехн. ун-та, 2016. – 250 с.
В монографии приведены результаты теоретических исследований
и компьютерного моделирования задачи робастного управления квадрокоптером при стабилизации траекторий пилотирования с малыми и
средними перегрузками. Разработана подробная математическая модель
летательного аппарата, учитывающая динамику системы исполнительных устройств и ограничение на управление. Построена двухуровневая
система стабилизации программных движений квадрокоптера. Произведена корректировка уровня компенсации для возможности управления
при произвольном повороте аппарата. Осуществлена настройка ПИД
регуляторов уровня стабилизации и исследованы возможности системы
управления. Согласно выявленным недостаткам контроллера, связанным с потерей в ряде случаев управляемости и устойчивости системы,
произведена его модификация. Рассмотрена процедура сглаживания
заданий. Введена дополнительная система ограничителей и защиты интеграторов от перенасыщения. Указанные мероприятия позволили добиться устойчивой отработки широкого класса траекторных движений.
Определены перспективы дальнейших исследований.
Книга будет полезной для научных работников, инженеров, преподавателей, аспирантов и студентов, специализирующихся в области автоматического управления, мехатроники и робототехники.
Табл. 10. Ил.161. Библиогр. 20 назв. Прил. 2.
Печатается по решению
Совета по издательской деятельности Ученого совета
Санкт-Петербургского политехнического университета Петра Великого.
© Бурдаков С. Ф., Марков А. О., 2016
© Санкт-Петербургский политехнический
ISBN 978-5-7422-5059-3 университет Петра Великого, 2016

Представляем вам курс "Модельная линейка DJI: Всё, что нужно знать о дронах!"
В этом курсе мы рассмотрим различные группы дронов, представленных в модельной линейке DJI. Они разделены на три основные категории: любительские, профессиональные и промышленные.
Формирование основ инженерного мышления у дошкольников через электроконструирование.

Черника – 2
Беспилотный летательный аппарат самолетного
типа для доставки груза массой 2,5 кг и
дальностью 100 км

Беспилотный летательный аппарат самолетного типа для доставки груза массой 0,7 кг и дальностью 80 км.
Образовательная программа «Оператор наземных средств управления беспилотным
летательным аппаратом » Нормативно правовая база БАС